For the second version of Animabot I want something different. I don’t want to see the motors or the electronic. I also want him more powerful, more intelligent and more friendly !
So for the design I opted for a full 3D printed body, which allow me smooth forms, and complex shapes. For the design I will inspire me from Norio Fujikawa which has made this one :

The design will be complex to do, but I think I am able to do it 😉
For the intelligence I will use 2 boards :
- The Broadcom BCM2835 ARM11 700Mhz “System On Chip” Processor
- Integrated Videocore 4 GPU capable of playing Full 1080p
- 512MB RAM
- Debian GNU/Linux Operating System
- 2 x USB Ports
- HDMI Video Output
- RCA Video Output
- 3.5mm Audio Output Jack
- 10/100Mb Ethernet Port
- 5V Micro USB Power Input Jack
- SD, MMC, SDIO Flash Memory Card Slot
- 26-pin 2.54mm Header Expansion Slot
- STM32F407VGT6 µC featuring 32-bit ARM Cortex-M4F core, 1 MB Flash, 192 KB RAM
- On-board ST-LINK/V2 with selection mode switch to use the kit as a standalone ST-LINK/V2
- Board power supply: through USB bus or from an external 5 V supply voltage
- External application power supply: 3 V and 5 V
- LIS302DL or LIS3DSH ST MEMS 3-axis accelerometer
- MP45DT02, ST MEMS audio sensor, omni-directional digital microphone
- CS43L22, audio DAC with integrated class D speaker driver
- Eight LEDs:
- LD1 (red/green) for USB communication
- LD2 (red) for 3.3 V power on
- Four user LEDs
- 2 USB OTG LEDs LD7 (green) VBus and (red) over-current
- Two push buttons (user and reset)
- USB OTG FS with micro-AB connector
- Extension header for all LQFP100 I/Os for quick connection
Why these 2 ones ? because the Raspberry is powerful, runs on Linux, is cheap and has an huge community. The second one because it has a lot of pins (breakout board) which allows me to connect sensors and also drives all the servomotors.
This time I made a proper architecture :
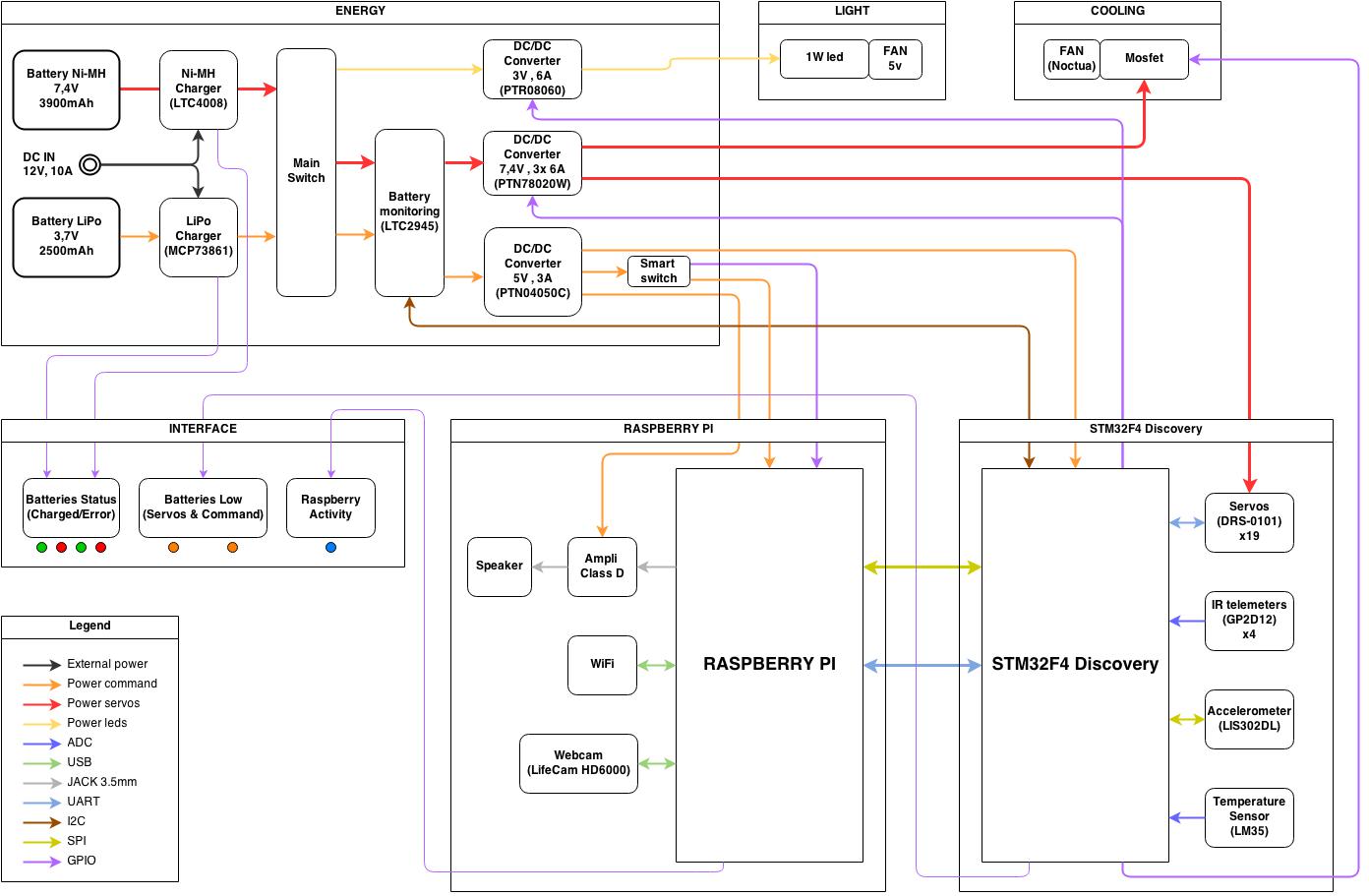
Architecture


I think using both Raspberry Pi model B and STM32F4 Discovery boards is an innovative approach.
LikeLike