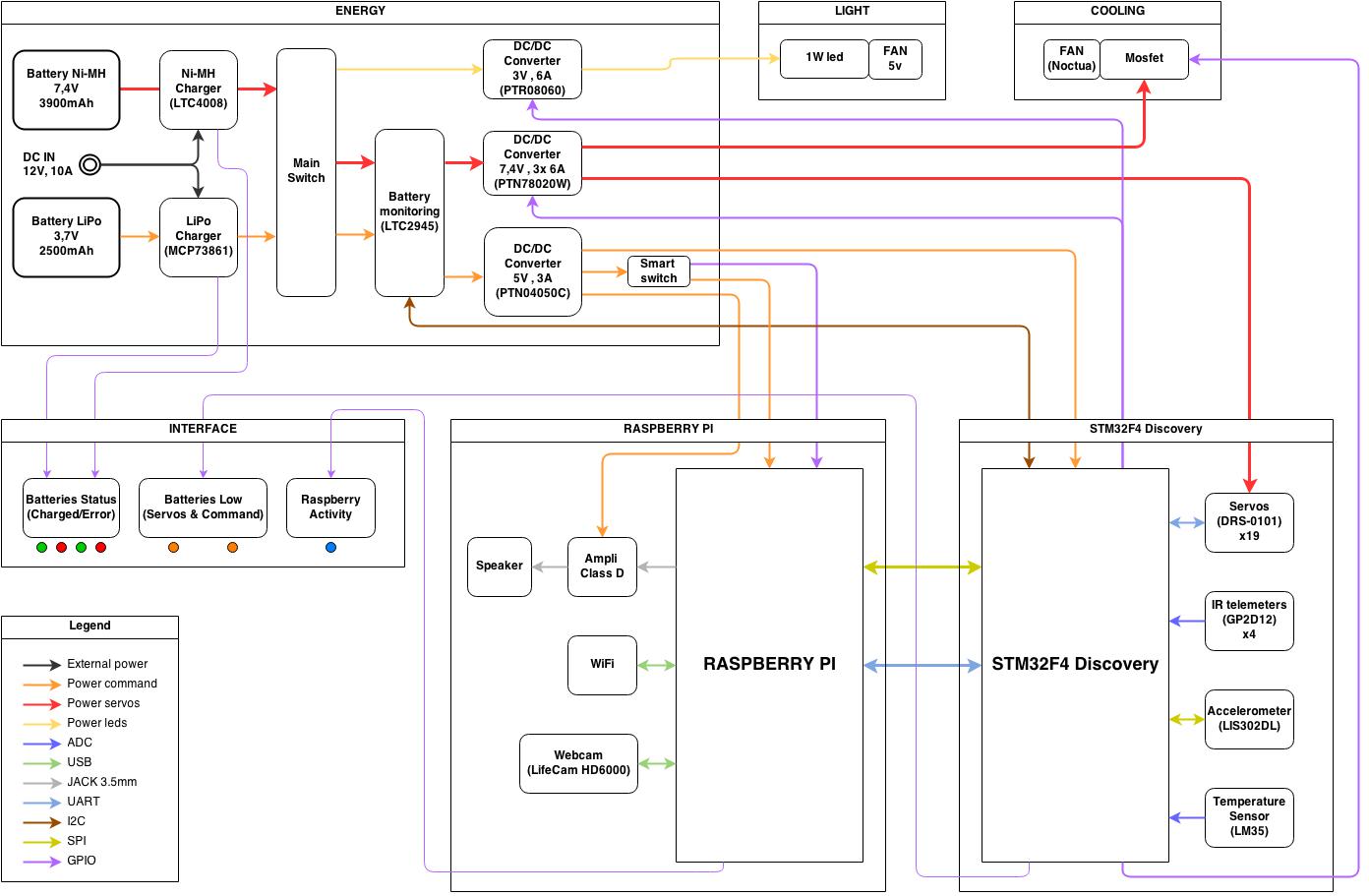
I finally received my samples from Texas Instrument for the voltage regulation. I chose to use several switching regulators in order to clearly separate each feature.

- The little one on the top left is a PTN04050C, it will be used as 5v power supply of the RasPi, the STM32 and the class D ampli of the speaker.
- The two on the left are PTN78060WAH, I will used only one for the light LED for night vision.
- The tree on the right are PTN78020WAH , they will be used the the legs: One for 2 legs (front, middle, rear).
Modules characteristics :
- 3-A Output Current (PTN04050C and PTN78060W)
- 6-A Output Current (PTN78020WAH)
- Wide-Input Voltage (2.95 V to 5.5 V) : PTN04050C
- Wide-Input Voltage (7 V to 36 V) : PTN78060W and PTN78020WAH
- Wide-Output Voltage Adjust (5 V to 15 V) : PTN04050C
- Wide-Output Voltage Adjust (2.5 V to 12.6 V) : PTN78060W and PTN78020WAH
- High Efficiency (Up to 96%)
- On/Off Inhibit
- Under-Voltage Lockout
- Output Current Limit
- Over-temperature Shutdown
- Operating Temperature: -40°C to 85°C
Animabot will use 2 batteries :
- 3.7v, 2500mAh Li-Po with charger for the brain
- 7.4v, 3900mAh Ni-MH for the legs
Each battery will have its own charger integrated in the robot, with one input connector for both.
The charger of the 7.4v battery is a LTC40008 , but it is only the chip, so I will have to make the circuit on the mother board. I will see that later…
The two batteries will be monitored by a specific component : LTC2945 (one one each). Animabot will be able to check the voltage and current on each battery and when the batteries will be low, Animabot will put itself on power saving mode, or sleep mode.
For the moment I am using another DC-DC boost converter from dfrobot for testing purpose, but in the future I will replace it by the PTN04050C on the motherboard.