Now it is time for the head assembly, as always, this is kind of a headache because of all the tiny parts and dimensions… I started by mounting the eyes (OLED PCB) with the 5Mpx camera (between the eyes). The PCB is screwed in place. Then I continued with the gesture sensor with is directly glued, I couldn’t used screws due to the thin thickness of the head and the lack of space !

Eyes and Gesture sensor

OLED Eyes

Head inner side
Then, followed the servos of the ears, this step was pretty straightforward. Place the motors and screw them 😉 As you can see, there is not so much space for adjustment…

Servos Ears

Servos Ears
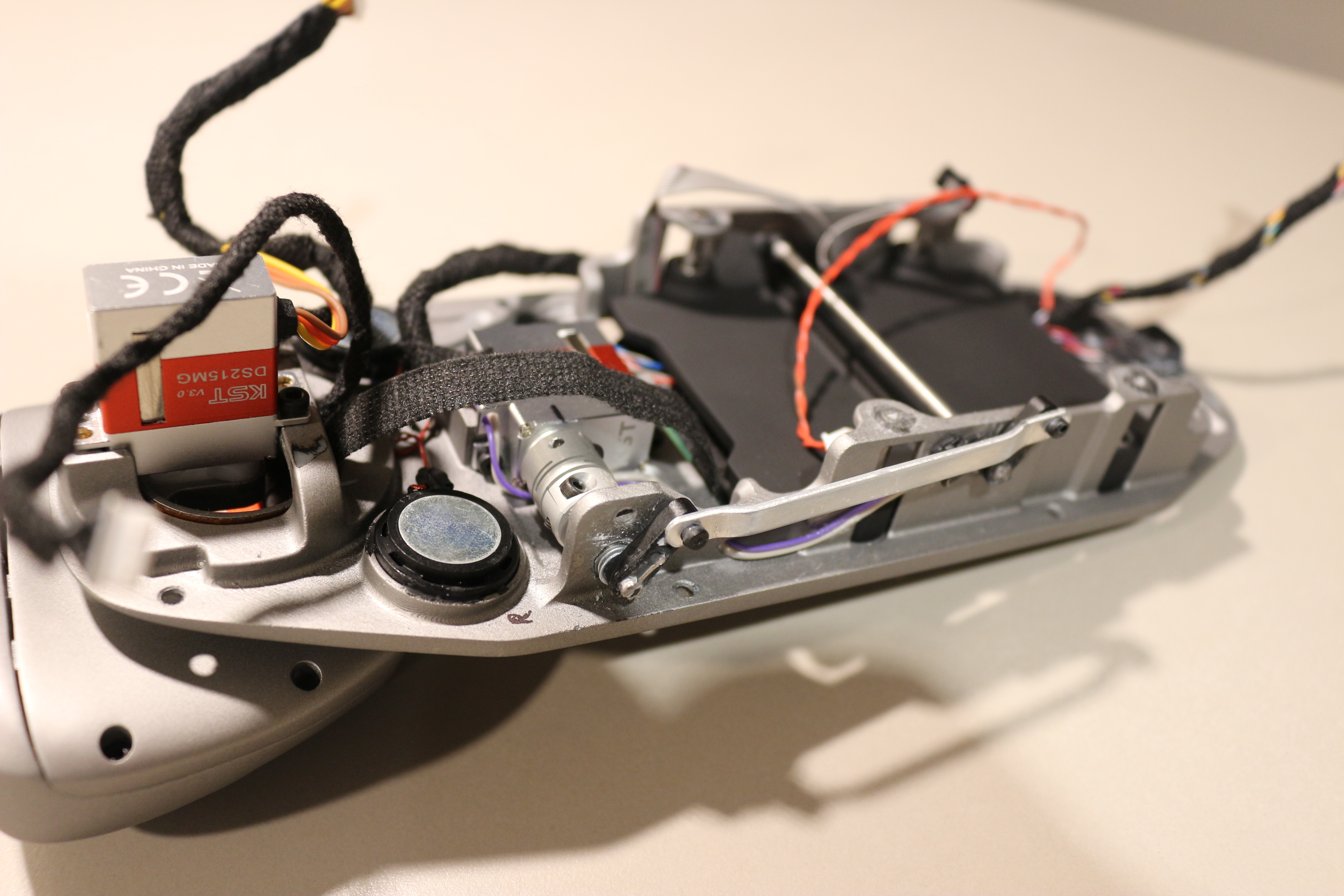
The most complicated part was to install the neck servos, due again to the small space, it was quite hard to fit all together with screws, bearings and cables… I had to make custom horns and spacers to fit everything in place. The overall tolerance I had to place the servos was exactly 1mm, and it took me a complete morning to assemble the head properly but that is the price for compactness.

Pitch servo assembly

Neck, bottom view

Neck, Top view
After mounting the neck onto its head, it was time to test if all was working as expected (I2C for the eyes and camera) and thankfully, it does :D. All the cables passe through the back of the neck for a rotation of about +- 60°. However, I have some doubts about the head connection to the yaw servo, I find it a bit weak and wobbly… I guess I will have to find a way to make it more robust.

All good !

Head complete

Ready to connect

Head bottom

Servo for Yaw movement

Head-Body connection
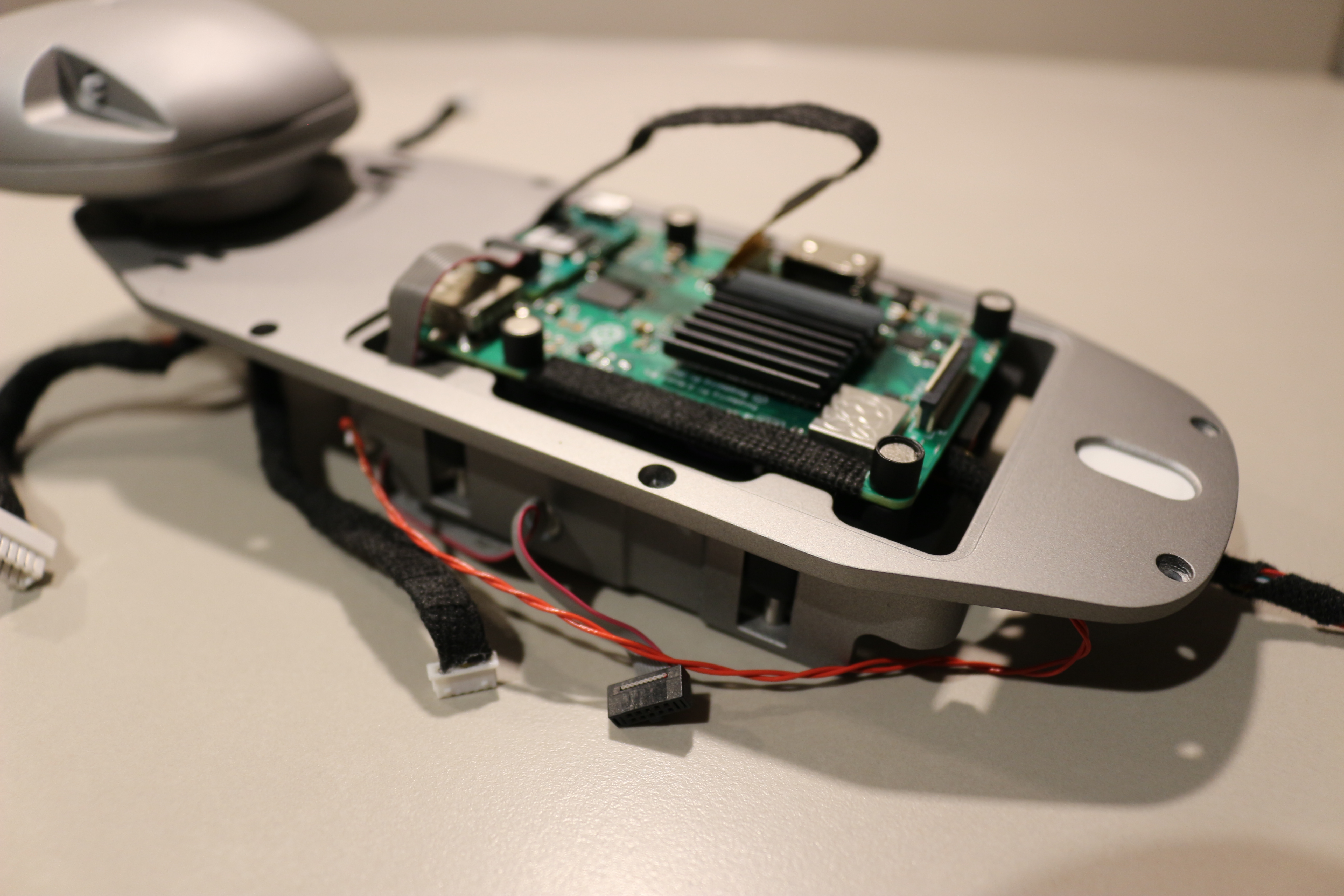
The last part to assemble is the Top Cover, containing the Raspberry Pi, audio amplifier, speakers, the Hood and the tactile switch…


































")





















{kind=link}